Finally a video of some of our ongoing research …
Gait analysis
September 27th, 2016Progress in MIMU research
September 27th, 2016Over the last years we have spent a significant research effort on analysis of the multiple-IMU (MIMU) systems and platforms we have built. Recently we have had result of two major efforts published:
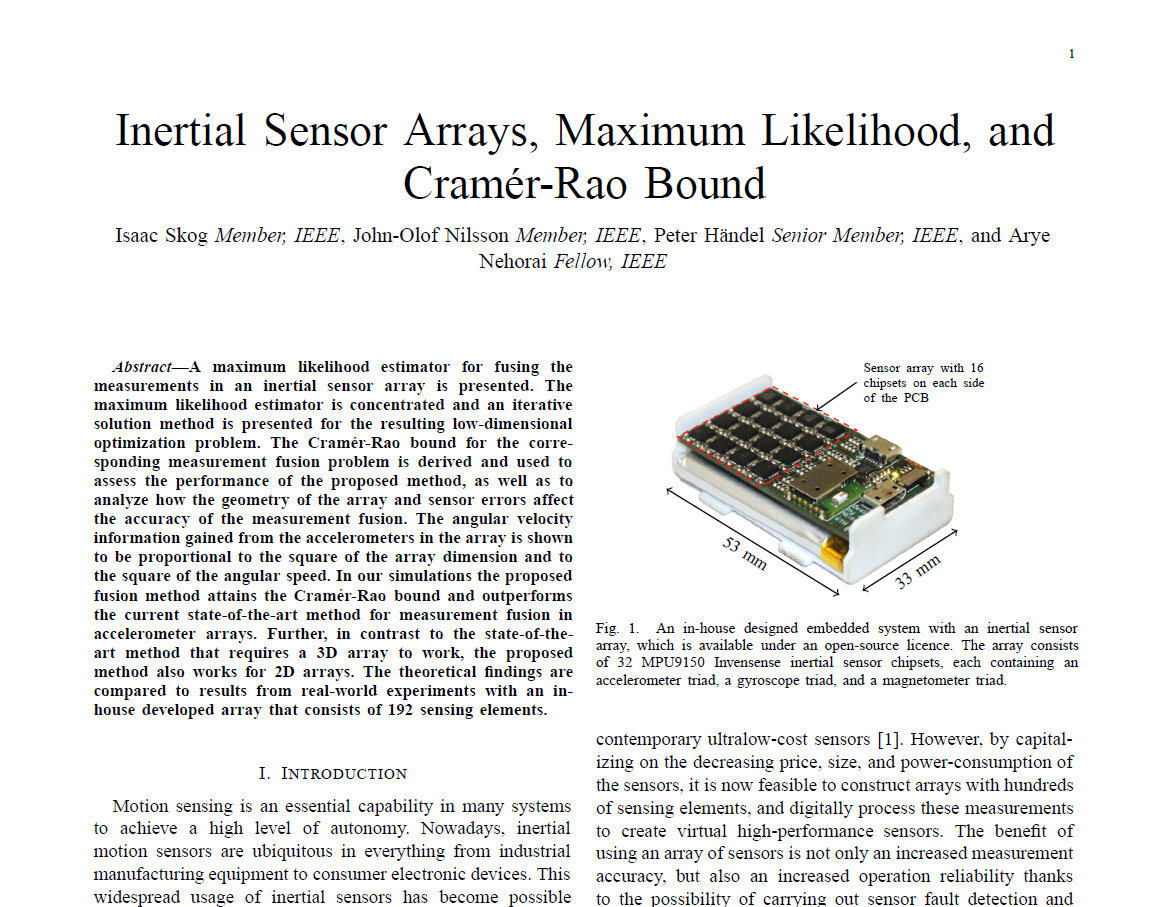
I. Skog, J.-O. Nilsson, P. Händel, A. Nehorai, “Inertial Sensor Arrays, Maximum Likelihood, and Cramér–Rao Bound”, IEEE Transactions on Signal Processing, vol. 64, no. 16, pp. 4218 — 4227, 2016.
The article contains the first estimation theoretical formulation and analysis of MIMU systems. The formulation makes it possible to analys fundamental properties of such systems and to derive efficient estimators. In the article,we:
- Derive bound on the achievable performance of MIMU-systems
- Suggest an efficient (achieving the bounds) maximum-likelihood estimators for such systems
- Analyze the properties and performance of MIMU-systems by simulations an experimental data
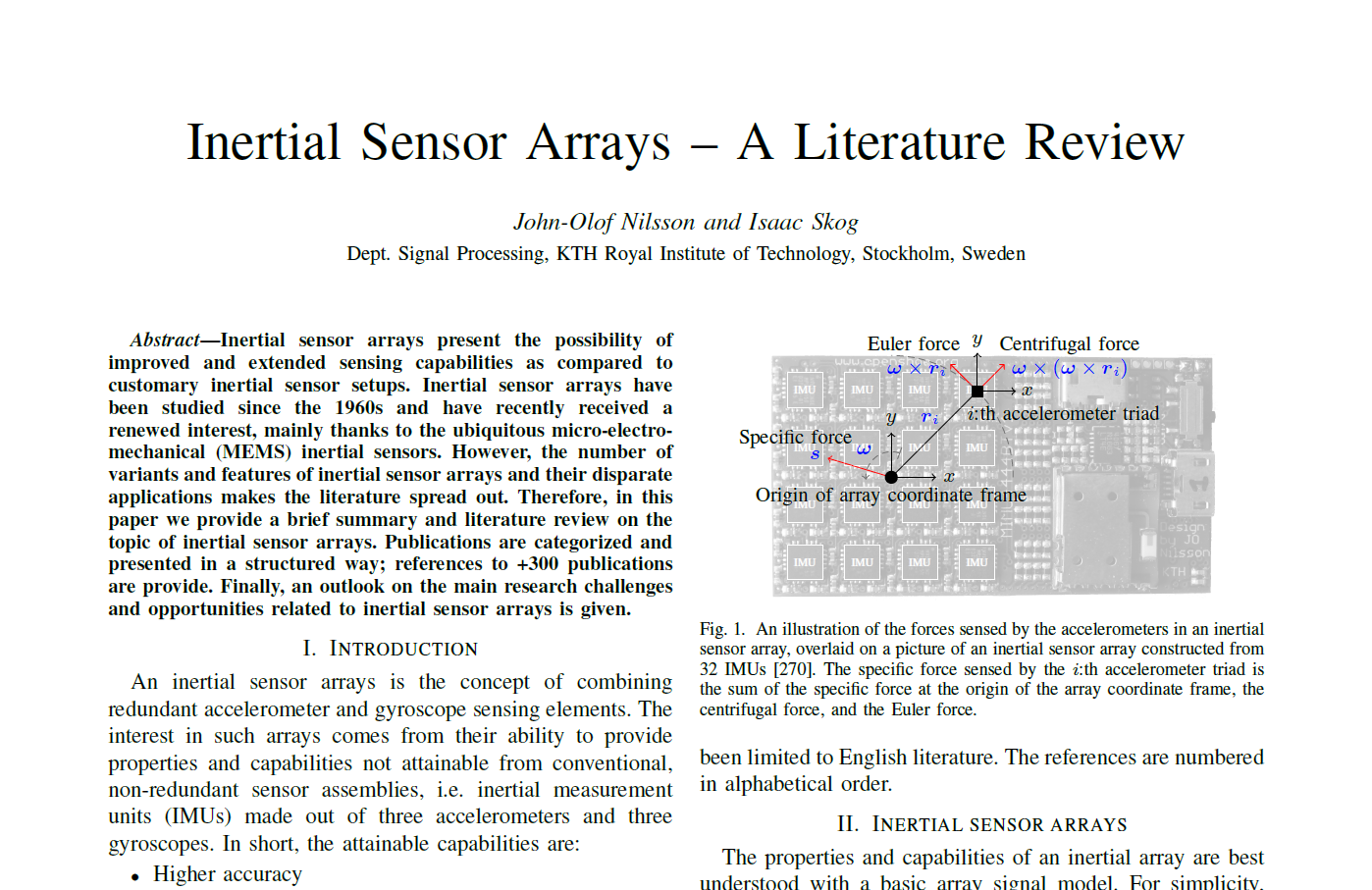
J.-O. Nilsson and I. Skog, “Inertial sensor arrays — a literature survey”, Proc. of 2016 European Navigation Conference (ENC), 30 May — 2 June, Helsinki, Finland, 2016.
Working with MIMU systems, we have come to realize that the related results are very much spread out and poorly crosscited. Therefore, we compiled a literature survey consisting of some +300 publications, categorized according to array setup, study area and application. The survey also contains a description of fundamental system properties of inertial arrays. Our hope is that the survey will provide the interested reader with an overview of the topic and inspire further research in an area where the rapid development of sensor and computational technologies provides many new opportunities.
Software updates
September 27th, 2016I see there has been almost a year since last update. In other words, time for some updates! I will start with some modules software updates. I’ve recently pushed some software updates for the embedded code. The main updates are:
- Support for reading out magnetometer data from the IMUs
- Bugfix for the lossless communication mode. A bug prevented packages from being resent.
In addition, numerous small improvement and modifications have been made.
The embedded software can be found at:
Software updates
September 30th, 2015Recently there has been a number of software updates on source forge:
1. The communication logic has now been isolated from the hardware dependencies and the UART (Bluetooth) and the USB is now handled by the same routines. Previously the communication logic code was duplicated to handle the two interfaces.
2. The project files have now been upgraded from Atmel Studio 6.5 to Atmel Studio 7.
3. The Atmel Software Framework (ASF) has been updated from version 2.7 to version 3.18. Further, all ASF/platform dependencies have been removed from the algorithms so there is no ASF stuff longer in the algorithm project.
Updated low-level communication routines
March 9th, 2015Over the last weeks I’ve updated the low-level communication routines in the embedded code. This should be the end of the clean-up and update of the communication interfaces over the last two month. Now the USB and the Bluetooth interfaces should behave identical, apart from the lower bandwidth of the Bluetooth interface. Further, both interfaces are now double buffered giving a slightly better performance. Overall these changes should not affect high level usage of the modules. What remains to be done is to actually merge the communication logics of the two different interfaces. Now there is a lot of code duplication, not more than before but just much more obvious. However, for now I’m content with the state of the code and I don’t think I will do this in the near future.
Somewhat adjusted control-scripts and calibration scripts:
Especially, in the calibration script I’ve added a pacing beep for placing the calibration body on the different sides for roughly the same time.
Edit: I’ve not updated the communication protocol documentation jet. I hope to do that before I forget about it. However, the changes are very small, essentially that the USB interface supports lossless communication just like the Bluetooth interface.
 OpenShoe is an open source project for creating an embedded foot-mounted
OpenShoe is an open source project for creating an embedded foot-mounted